









Smart Top Link

NR CZĘŚCI: ACX5382160
POZIOM W GÓRĘ
Inteligentny łącznik górny utrzymuje poziom zamontowanego rozsiewacza nawozów, utrzymując precyzyjny rozrzut. Hydrauliczny łącznik górny jest sterowany przez dwa czujniki zamontowane z przodu i z tyłu rozrzutnika, co prowadzi do lepszego wzrostu upraw i zwiększenia plonów.
Dostępne
Valtra Unlimited (instalacja fabryczna)
AGCO PARTS (modernizacja dla wszystkich marek AGCO)
Tylko w Europie

PRZEGLĄD
- Funkcja poziomowania z regulacją w czasie rzeczywistym
- Czujniki mierzące odległość do ziemi
- Precyzyjny rozrzut
- Zmniejsza współczynnik zmienności
- Równomierny wzrost plonów
- Pasuje do wszystkich rozrzutników nawozów
- Podłączony do ISOBUS
- Sterowanie górnym łącznikiem hydraulicznym
WYMAGANIA
ISOBUS
Ciągnik musi być kompatybilny z ISOBUS, aby umożliwić komunikację między maszyną i terminalem
CECHY HYDRAULICZNE
Układ wymaga przewodów hydraulicznych wykrywających obciążenie i hydraulicznego łącznika górnego zamontowanego w ciągniku
SZYBKI PRZEWODNIK
JAK KORZYSTAĆ
TRYBY PRACY

WYŁĄCZONY
Jeśli chcesz zacząć korzystać z Smart Top Link,
Naciśnij przycisk „AUTO OFF”, aby włączyć system.

PAUZA
Ciągnik nie porusza się lub prędkość przekracza 25 km/h.
Dostosuj prędkość ciągnika, a system przełączy się na tryb „AUTO”.
Jeśli to nie zadziała, w niektórych szczególnych przypadkach dane z czujnika nie będą wystarczająco wiarygodne, aby umożliwić automatyczne sterowanie. W takim przypadku patrz Kody usterek.

AUTOMATYCZNA
Łącznik górny pracuje automatycznie, aby utrzymać narzędzie w poziomie.
Należy pamiętać, że gdy ciągnik zacznie się poruszać, łącznik górny zacznie się prawidłowo pracować po 20 sekundach, nawet przy „AUTO”.

Widok główny
1. Menu ustawień
2. Status systemu (OFF/PAUZA/AUTO)
3. Bieżący kąt narzędzia
4. Widok pomocy
5. Ręcznie wysunąć łącznik górny
6. Kąt docelowy
7. Ręcznie skrócić łącznik górny
8. Aktualna wysokość narzędzia
9. Przycisk AUTO ON/OFF do Smart Top Link
SZYBKIE USTAWIANIE KĄTA
Jeśli łącznik górny ma szybko ustalić kąt (na przykład po napełnieniu), zaleca się opuszczenie rozsiewacza (o co najmniej 5% wysokości) w celu napełnienia. Po ponownym podniesieniu system Smart Top Link wykryje napełnienie i szybciej skoryguje kąt rozrzutnika (w ciągu jednej minuty). Należy również pamiętać, że jeśli kąt rozrzutnika jest większy niż 5 stopni od celu, system nie poprawi kąta ze względów bezpieczeństwa.
REGULACJA WYSOKOŚCI
Można również obserwować wysokość narzędzia.
Prawidłowa wysokość narzędzia jest często wskazywana w instrukcji obsługi narzędzia.
UŻYWANIE SYSTEMU W DUŻYCH KĄTACH (kąt docelowy 5-6 stopni)
Normalne ustawienie kąta docelowego na ekranie jest prawidłowym sposobem korzystania z systemu. Gdy kąt docelowy wynosi 5 stopni lub więcej, zaleca się ustawienie rozrzutnika pod żądanym kątem, a następnie ustawienie czujników w taki sposób, aby były skierowane prosto w dół do ziemi. Następnie należy przeprowadzić kalibrację aby rozpocząć korzystanie z systemu (z kątem celu na ekranie przy 0). Należy pamiętać, aby ponownie wyregulować czujniki podczas rozrzucania pod mniejszymi kątami.
Podczas transportu należy wyłączyć Smart Top Link ze względów bezpieczeństwa.
System należy stosować wyłącznie w warunkach polowych (poniżej 25 km/h), podczas serwisowania narzędzia układ musi być wyłączony.
DO CIĄGNIKA

Poniżej znajdują się instrukcje montażu części montowanych w różnych ciągnikach.
Każda wersja dla ciągników zawiera film i skróconą instrukcję do pobrania, którą można wydrukować w celu ułatwienia instalacji.
DO CIĄGNIKA — W SKRZYNCE
Części, które są montowane w ciągniku i dostarczane wraz z systemem Smart Top Link, to części hydrauliczne, blok hydrauliczny, moduł ECU, wiązka przewodów i mocowanie (zgodnie z zamówieniem). Przewiń w dół, aby zapoznać się z krótkim przewodnikiem dla określonych marek ciągników.
W przypadku pozostałych elementów i przewodów elastycznych, które połączą blok hydrauliczny z ciągnikiem, do każdego wspornika montażowego dołączona jest lista odpowiednich elementów.
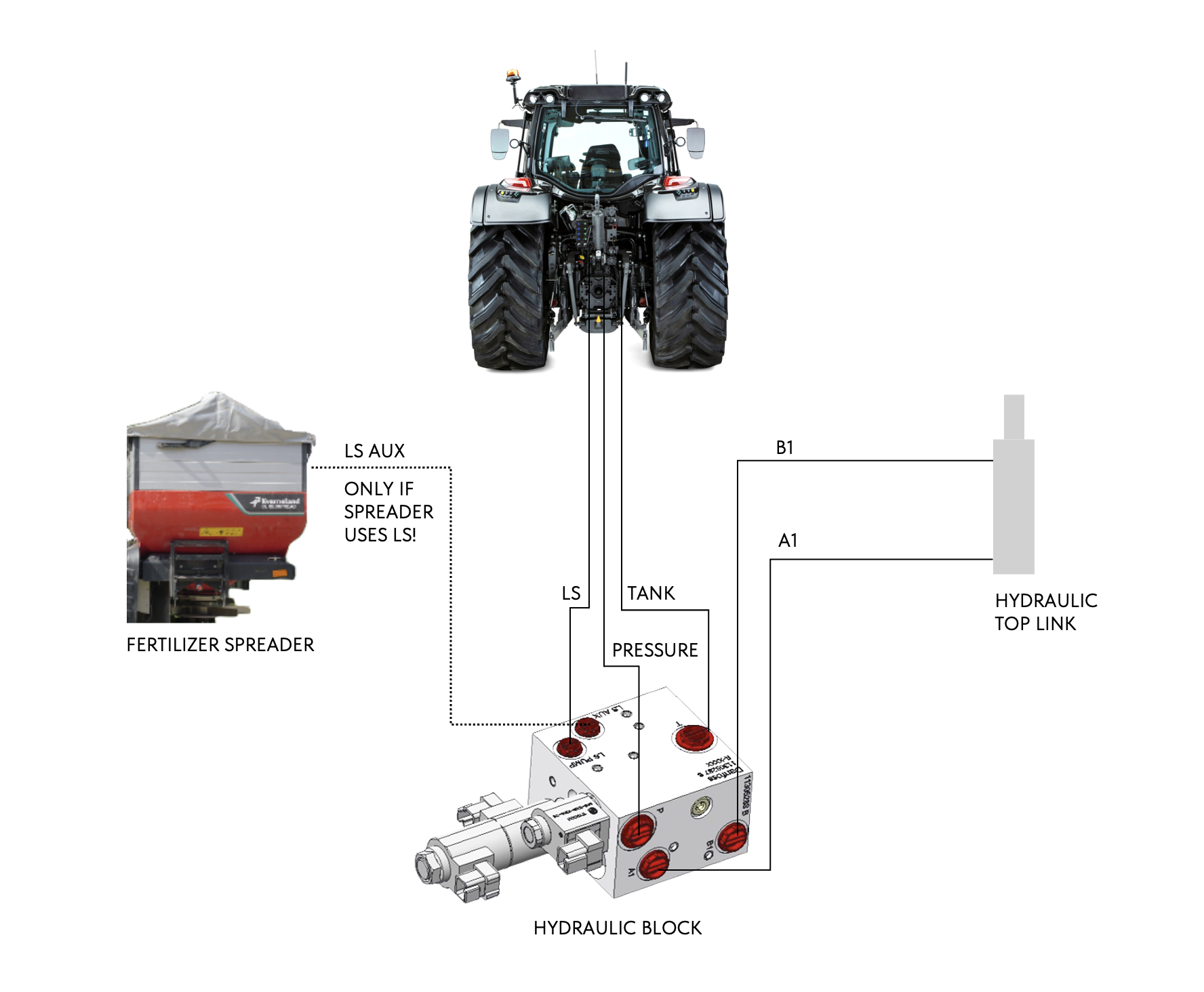
Schemat hydrauliczny
Połączenia hydrauliczne układu przedstawione na poniższym rysunku.

Blok hydrauliczny
1. POMPA LS (do ciągnika z linią LS ) M14
2. LS AUX (wąż elastyczny LS narzędzia) M14
3. ZbiornikM22
4. CiśnienieM22
5. Łacznik górny +M18
6. Łącznik górny łączeM18

Złącza hydrauliczne dostarczone wraz z układem to LS AUX z żeńskim złączem 3/8” i dwa żeńskie szybkozłącza do przewodów elastycznych łącznika górnego ½”.
1. złącze 3/8” z przewodami pod kątem 90 i złączką M14-3/8”
2. złącze ½” z adapterem M18-1/2” i podkładkami
3. złącze ½” z adapterem M18-1/2” i podkładkami

Orientacja zamontowania bloku hydraulicznego jest ważna dla prawidłowego działania. Blok hydrauliczny należy zawsze montować w taki sposób, aby zawory magnetyczne znajdowały się w kierunku poziomym.

PRZYŁĄCZA ELEKTRYCZNE BLOKU HYDRAULICZNEGO
1. „Y1” zawór plus
2. „Y2”, zawór minus
3. „Y3”, zawór bezpieczeństwa

POŁĄCZENIA ELEKTRYCZNE ECU
Azłącze hydrauliczne
złącze C. ISOBUS
D. Wiązka przewodów czujnika
B. -

ŚWIATŁA MODUŁU ECU
1. Stan pracy (ECU) Zielona światło / Brak migania
- Jeśli zielona światło miga raz na sekundę, należy zakończyć aktualizację oprogramowania
2. Stan 1 (ISOBUS)Zielone i czerwone lampki migają
3. Stan 2 (CAN czujnika) Migają zielone i czerwone lampki
ODPOWIETRZANIE SYSTEMU
Po zainstalowaniu osprzęt, za pomocą Smart Top Link, trzykrotnie przestawić łącznik górny z najkrótszego położenia do najdłuższego położenia, aby odpowietrzyć system. W przeciwnym razie w systemie może znajdować się powietrze, które będzie powodować nieprawidłowe działanie.
MONTOWANIE CZĘŚCI CIĄGNIKA NA ROZRZUTNIKU

Blok hydrauliczny i moduł ECU mogą być również zamontowane w narzędziu.

W tym przykładzie pokazano również, że przewody hydrauliczne zostały oddzielone od rozrzutnika (Amazone).
FENDT 500, 700, 800 I 900
Fendt 500/700/800/900
MASSEY FERGUSON 6S/7S
MASSEY FERGUSON 6S/7S
VALTRA N-, T-SERII
VALTRA N-, T-SERII
VALTRA Q-, S-SERIES & MASSEY FERGUSON 8S, 9S
VALTRA Q-, S-SERIES & MASSEY FERGUSON 8S, 9S
DO WYKONANIA
W tym momencie instalacja części ciągnika Smart Top Link została zakończona. System Smart Top Link wykorzystuje dwa czujniki, które należy zamontować w narzędziu wraz z wiązką. Aby zakończyć instalację czujników, należy wykonać następujące czynności.



1. Włącz maszynę i upewnij się, że ISOBUS UT jest aktywowany w terminalu ciągnika. Otwórz widok ISOBUS UT z terminala i poczekaj na załadowanie aplikacji. Po załadowaniu na wyświetlaczu pojawi się widok ekranu głównego systemu Smart Top Link.

2. Podłączyć przewody czujników do 4-stykowego gniazda w tylnej części ciągnika, a drugi koniec do czujników.

3. Włączyć tryb identyfikacji czujników z poziomu wyświetlacza ISOBUS ciągnika.
- Dzięki temu czujniki będą migać w różnych kolorach.
- Zamontować czujnik 1 (niebieski) z tyłu narzędzia
- Zamontować czujnik 2 (zielony/żółty) z przodu narzędzia.

4. Przymocować czujniki do stalowych płyt

5. Montaż czujników w narzędziu
- Wskazywanie prosto na ziemię
- Upewnić się, że czujniki znajdują się pod tarcza rozsiewającą
- Na wysokości co najmniej 30 cm od podłoża, podczas gdy rozrzutnik znajduje się na wysokości roboczej. Czujniki powinny znajdować się mniej więcej na tej samej wysokości.
- Oba czujniki powinny być w linii, jednak istnieje tolerancja 40 cm. Odległość między czujnikami powinna wynosić co najmniej 70 cm.
- Zaleca się zamontowanie ich na środku narzędzia.
- Jeśli czujnik znajduje się zbyt blisko ramy narzędzia, mogą wystąpić odbicia, które negatywnie wpływają na odczyt czujników
- Upewnij się, że czujniki nie kolidują z powierzchnią podłoża podczas opuszczania narzędzia!

PRZYKŁADY WDROŻENIA
Bogballe montuje radary.

PRZYKŁADY WDROŻENIA
Kverneland montuje radary.

6. Zamocuj luźne przedmioty w pobliżu czujnika
- Łańcuchy, linki i elastyczne przewody hydrauliczne

7. Zamocować kable
- Nie zginać mocno kabli.
- Wszystkie kable powinny być pewnie przymocowane do ramy narzędzia.
- Upewnij się, że nie są one ściśnięte między metalowymi przedmiotami.
- Przewody nie powinny wpływać na ruch jakichkolwiek części narzędzia.
- Upewnić się, że złącza są prawidłowo zablokowane.
- Upewnij się, że kabel nie jest zbyt luźny, ponieważ grozi to kolizją z powierzchnią gleby.
- Upewnić się, że przewody nie są zbyt ciasne, ponieważ grozi to hamowaniem podczas przemieszczania narzędzia.

8. Ustawić narzędzie na wysokości roboczej i upewnić się, że jest wypoziomowane względem podłoża.
Następnie wykonaj kalibrację.
KALIBRACJA
Procedurę kalibracji należy przeprowadzić za każdym razem, gdy zmienia się sposób instalacji czujników. Zaleca się przeprowadzenie kalibracji z pustym rozrzutnikiem.
- Upewnić się, że rozrzutnik nawozu jest prawidłowo zamontowany do tylnego układu zawieszenia.
- Podnieść rozrzutnik nawozu na wysokość roboczą (można sprawdzić instrukcję rozrzutnika pod kątem precyzyjnych wymagań dotyczących wysokości).
- Kalibracja na płaskiej powierzchni pola, kalibracja na betonie lub asfalcie nie jest wskazana
- Upewnić się, że rozrzutnik nawozu jest wypoziomowany, ręcznie mierząc z przodu i tyłu rozrzutnika.
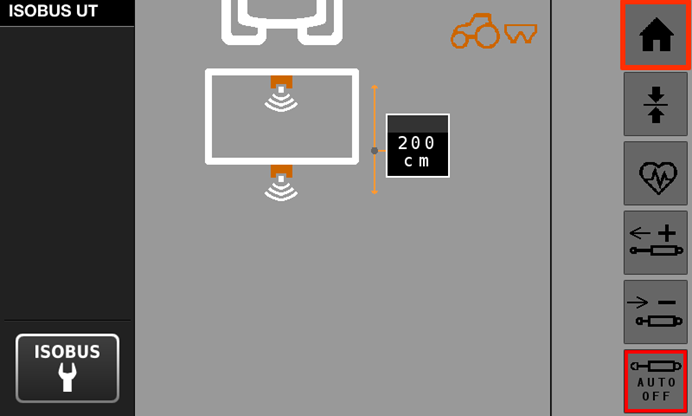
Widok główny
1. Menu ustawień
2. Status systemu (OFF/PAUZA/AUTO)
3. Bieżący kąt narzędzia
4. Widok pomocy
5. Ręczne wysunięcie łącznika górnego
6. Kąt docelowy
7. Ręczne skracanie łącznika górnego
8. Aktualna wysokość narzędzia
9. Przycisk Wł./Wył. AUTO do włączania i wyłączania funkcji Smart Top Link

Krok 1
Zmierzyć odległość między czujnikami.
Otwórz ustawienia i wstaw wartość w odpowiednie pole.
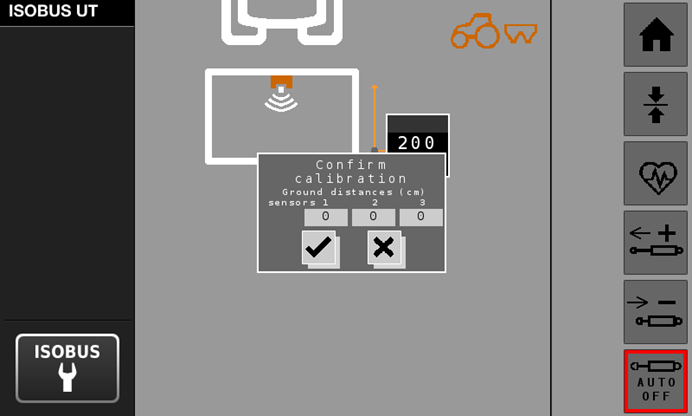
Krok 2
Nacisnąć przycisk kalibracji i sprawdzić, czy wartości czujnika są realistyczne. Wysokość czujnik można zmierzyć za pomocą taśmy pomiarowej.
Krok 3
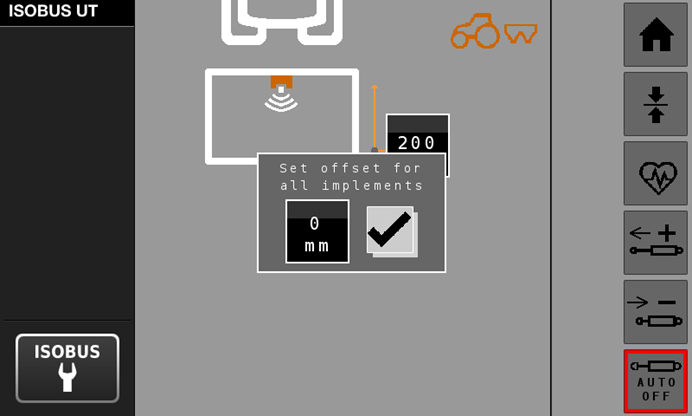
Zmierzyć odległość tarczy rozrzutnika od podłoża i wprowadzić ją do wartości offsetu.

Wprowadzić zmierzoną wartość do korekcji.

Kalibracja zakończona

Po kalibracji
Aby sprawdzić, czy Smart Top Link działa prawidłowo, możesz wykonać następującą procedurę
- Ręcznie ustawić narzędzie pod kątem -4 stopni
- Tylny TUZ (o co najmniej 5%)
- Podnieś ponownie TUZ
- Jeździć po polu powyżej 3 minut
- Narzędzie powinno być wypoziomowane w ciągu jednej minuty
PODRĘCZNIK
DIAGNOSTYKA

- Wartości odległości od ziemi (wartości surowe, przefiltrowane i skalibrowane)
- Średnia wartość odległości od podłoża.
- Statusy czujników.
- Wartości jakości czujnika (niezawodność danych).
- Wartości kalibracji.
- Górna granica zakresu wysokości (można regulować).
- Górna granica zakresu wysokości (można regulować).
- Kąt przechyłu w stopniach.
- Wartości przesunięcia.
- Numer wersji oprogramowania.
- NASTĘPNY VT (zmiana priorytetu interfejsu użytkownika ISOBUS w przypadku wielu narzędzi ISOBUS)
BEZPIECZEŃSTWO
Wyświetlacze i konsole sterujące
Sprawdzić, czy użytkownik zna zasady obsługi ciągnika i narzędzi oraz czy reaguje na ostrzeżenia ciągnika.
Jeśli system Smart Top Link zachowuje się nieprawidłowo lub wyświetla kody usterek, należy zapoznać się z podręcznikiem konserwacji w celu uzyskania dalszych opisów przyczyn i rozwiązań lub skontaktować się z serwisem AGCO.
Bezpieczeństwo hydrauliczne
**Stosować wyłącznie łączniki górne zatwierdzone przez firmę AGCO
Podczas instalowania lub serwisowania układu hydraulicznego lub podzespołów hydraulicznych należy pamiętać, że płyn hydrauliczny może być bardzo gorący i pod wysokim ciśnieniem. Nigdy nie wolno otwierać ani pracować na układzie hydraulicznym przy pracującym lub obciążonym narzędziu. Podczas instalacji lub konserwacja narzędzie lub maszyna muszą pozostać nieruchome.
Podjąć środki ostrożności, aby zapobiec wprowadzaniu ciał obcych lub zanieczyszczeń do układu hydraulicznego narzędzia.
Podczas uruchamiania układu po raz pierwszy czas po zamontowaniu lub serwisowaniu podzespołów hydraulicznych należy używać sprzętu ochronnego i stać z dala od narzędzia, jeśli wąż nie został prawidłowo podłączony lub dokręcony.
Bezpieczeństwo elektryczne
Sprawdzić, czy przewody wiązki elektrycznej są nienaruszone i prawidłowo podłączone. Aby uniknąć ryzyka zaplątania, należy ostrożnie poprowadzić linki i wiązki przewodów na narzędziu. Pozostawić wystarczająco dużo miejsca na ruch i upewnić się, że ruchome części nie mogą dotykać kabla.
Bezpieczeństwo maszyn
Upewnić się, że łącznik górny ma wystarczający zakres ruchu, a zatem nie powoduje kolizji narzędzia z ciągnikiem ani powierzchnią podłoża.
Podczas wykonywania konserwacji lub innych prac w pobliżu łącznika górnego lub narzędzia poza ciągnikiem należy upewnić się, że inteligentny łącznik górny jest wyłączony z użycia.

AKTUALIZACJE OPROGRAMOWANIA
Najnowszą wersję oprogramowania 0.5.1 3 można znaleźć w aplikacji „JCA Wind Tools” lub aplikacji „PTx Wind Tools”.
Pobierz i zainstaluj aplikację ze sklepu z aplikacjami na urządzenia mobilne.
Najnowsze usprawnienia:
- Ulepszona logika filtrowania czujnika w celu poprawy zachowania w trudnych warunkach
- Lepsza responsywność interfejsu użytkownika
- Naprawiono błąd, w wyniku którego ikona narzędzia i kąt docelowy nie były zsynchronizowane
- Zablokowanie stałej kalibracji
- Dodano przycisk anulowania do pierwszego przycisku kalibracji
- Aktywacja kodów błędów dostosowana
- Ulepszona logika sterowania górnym łącznikiem, aby zwiększyć jego responsywność
- Większa dokładność szybkiego poziomowania
- Wykres słupkowy wysokości ekranu głównego zmieniony z 0–100 cm na 60–100 cm
KODY USTEREK
| NUMER | TYTUŁ | OPIS | WAŻNE | |
| 1 | Błąd konfiguracji czujnika 1 | Sprawdzić połączenia/czujnik i ustawienia konfiguracji czujnik. | Średnie | |
| 2 | Błąd odwracalności czujnika 2 | Błąd wewnętrzny czujnika, sprawdzić temperaturę czujnika i wiązkę przewodów. | Średnie | |
| 3 | Nieodwracalny błąd 3 czujnika | Wewnętrzny błąd czujnika, skontaktować się z dealerem AGCO w celu wymiany części. | Wysoki | |
| 4 | Nieprawidłowy błąd danych 4 | Sprawdzić położenie czujnika (np. zbyt blisko ziemi, powierzchnie odbijające światło). | Niski | |
| 5 | Błąd odległości od podłoża 5 | Sprawdzić, czy jakiekolwiek obiekty nie blokują widzenia czujnika i potwierdzić, że wartości odległości mieszczą się w granicach. | Średnie | |
| 6 | Błąd komunikacji magistrali CAN ISOBUS 6 | Sprawdzić wiązkę przewodów ISOBUS i połączenie kablowe | Wysoki | |
| 7 | Błąd komunikacji czujnika CAN 7 | Sprawdzić okablowanie czujnika i połączenie kablowe | Wysoki | |
| 8 | Otwarty obwód w zaworze plus 8 | Otwarty obwód w wiązce przewodów zaworu plus bloku hydraulicznego | Średnie | |
| 9 | Zwarcie w zaworze Plus zaworu 9 | Zwarcie w wiązce zaworu plus bloku hydraulicznego | Wysoki | |
| 10 | Przerwa w obwodzie w zaworze minus 10 | Przerwa w obwodzie w wiązce zaworu ujemnego bloku hydraulicznego | Średnie | |
| 11 | Zwarcie w zaworze Minus 11 | Zwarcie w wiązce zaworu ujemnego bloku hydraulicznego | Wysoki | |
| 12 | Przerwa w obwodzie zaworu bezpieczeństwa 12 | Przerwa w obwodzie w wiązce zaworu bezpieczeństwa bloku hydraulicznego | Średnie | |
| 13 | Zwarcie w zaworze bezpieczeństwa 13 | Zwarcie w wiązce zaworu bezpieczeństwa bloku hydraulicznego | Wysoki | |
| 14 | Czujnik 1 Błąd złej jakości sygnału 14 | Sprawdzić położenie czujnika i pod kątem możliwych obiektów blokujących, odbijających się powierzchni lub luźnych przedmiotów w pobliżu czujnik | Średnie | |
| 15 | Czujnik 2 Błąd złej jakości sygnału 15 | Sprawdzić położenie czujnika pod kątem możliwych obiektów blokujących, odbijających się powierzchni lub luźnych przedmiotów w pobliżu czujnika | Średnie | |
| 100 | Ostrzeżenie dotyczące kalibracji | Podczas kalibracji maszyna musi być nieruchoma | Niski |
Uwaga!
Smart Top Link jest przeznaczony do stosowania w warunkach polowych. Jazda na placu lub żwirze itp. Może powodować kody błędów 14 i 15 (czujniki 1 i 2 – słaba jakość sygnału)
CZĘSTO ZADAWANE PYTANIA
Czy Smart Top Link zmienia aplikowaną dawkę?
- NIE, Smart Top Link dostosowuje kąt maszynaCzy automatycznie reguluje również wysokość narzędzia?
- Nie, ale dzięki Smart Top Link możesz bardzo dokładnie monitorować wysokość, w razie potrzeby dokonując regulacji.Czy uprawa ma wpływ na pomiar?
- NIE, czujnik mierzy odległość do gruntu.Czy działa na pagórkowatych polach?
- TAK, Po prostu utrzymuje narzędzie równolegle do podłoża (podłoża, które znajduje się pod rozsiewaczem. Używamy filtra w systemie sterowania, więc drobne zmiany na podłożu nie mają znaczenia)Czy mogę używać jednocześnie innych narzędzi ISOBUS
- TAK, ekran ISOBUS będzie miał przycisk do przełączania między ekranamiCzy mogę używać rozsiewacza nawozów z hydrauliką LS w połączeniu z Smart Top Link?
- Tak , Smart Top Link posiada wbudowany rozdzielacz do węża pomocniczego LS dla narzędzi
Czy widok ekranu musi być zawsze widoczny w terminalu?
- NIE ,Smart Top Link może również działać w tle.Czy można go stosować w innych narzędziach?
- NIE, zaprojektowaliśmy go do użytku z rozrzutnikiem nawozów.Czy można go używać w każdym ciągniku?
- NIE, W tej chwili przetestowaliśmy tylko Smart Top Link do pracy z maszynmi AGCO.- Czy mam podłączyć układ bezpośrednio do normalnych zaworów ciągnika?
-NIE, układ jest wyposażony w dodatkowy blok hydrauliczny, który jest podłączony do układu hydraulicznego LS ciągnika.
- Dlaczego na ekranie głównym wyświetlany jest tekst „PAUZA” zamiast „AUTO”?
- Tekst PAUZA wskazuje, że system nie kontroluje obecnie automatycznie łącznika górnego. Przyczyną może być nieruchomy ciągnik, prędkość ciągnika przekracza 25 km/h lub aktywny błąd w układzie.
- Kiedy jeżdżę po drodze, na ekranie pojawia się mały symbol. Co to oznacza?
- Ciągnik jedzie ponad 25 km/h, a system jest w trybie PAUZA ze względów bezpieczeństwa
- Nie mogę aktywować automatyki lub automatyka wyłącza się sama
- Wystąpił błąd krytyczny w systemie przez ponad 10 sekund. Sprawdzić aktywne kody błędów i postępować zgodnie z informacjami o kodzie błędu. System wyłącza się również po ponownym uruchomieniu ciągnika i/lub układu
- W dolnej części ekranu miga czerwony trójkąt
Czerwony trójkąt ostrzega o aktywnych błędach w systemie. Aby uzyskać więcej informacji, naciśnij przycisk „Info” na interfejsie użytkownika.
Dlaczego mój łącznik górny nie porusza się w trybie AUTO?
Gdy ciągnik zacznie się poruszać, rozpoczęcie ruchu przez łącznik górny zajmie 15–20 s. Jeśli aktualny kąt jest większy niż 5 stopni od kąta docelowego, system nie przesuwa górnego łącznika ze względów bezpieczeństwa.
Dlaczego łącznik górny jest tak wolny w trybie AUTO?
System jest przeznaczony do kompensowania zmiany kąta podczas opróżniania rozrzutnika, zwykle jest to powolna zmiana. W przypadku większych korekt kąta, które należy wykonać szybciej, zapoznaj się z SZYBKIM PRZEWODNIKIEM / SPOSÓB UŻYCIA / SZYBKA KOREKTA KĄTA
Ciągle otrzymuję kody błędów 14 i 15. Co mogę zrobić?
Upewnić się, że czujniki są prawidłowo zainstalowane i nie ma luźnych przedmiotów, takich jak linki lub łańcuchy w pobliżu czujników, nawet powyżej czujnika (patrz rysunek w SZYBKIEJ INSTRUKCJI / DO NARZĘDZIA / Krok 6). Czasami przyczyną błędu może być powierzchnia pod czujnikiem, na przykład podczas jazdy po podwórzu lub asfalcie, szczególnie gdy jest mokro.